著名科技媒體報道這項研究工作
導(dǎo)語:
北京時間2017年9月21日,國際頂級期刊《科學(xué)》(Science)機器人子刊《科學(xué)機器人學(xué)》以長文(Research Article)刊登了由北京航空航天大學(xué)文力副教授課題組牽頭,與美國哈佛大學(xué)課題組合作研制的最新研究成果“仿生?魚軟體吸盤機器人”(A biorobotic adhesive disc for underwater hitchhiking inspired bythe remora suckerfish)。同日,麻省理工科技評論也報道了該項研究。研究揭示了魚的吸附機制,并為未來的低功耗水下仿生軟體機器人、水下吸附裝置提供了新思路。文章的第一作者為機械工程與自動化學(xué)院博士研究生王越平,通訊作者為機械工程及自動化學(xué)院、國際交叉科學(xué)研究院仿生軟體機器人實驗室文力副教授。
機械手使用仿生吸盤來抓取物品
與海洋生物的淵源
從2014年的3D打印人造仿生鯊魚皮到2017年的軟體章魚觸手機器人原理樣機,文力老師的多數(shù)研究都跟海洋生物密不可分。數(shù)萬年的進化讓這些生物對周圍環(huán)境游刃有余,鯊魚龐大的身軀有著光滑的皮膚,使它能在水中快速移動并捕食獵物,章魚觸手的靈活性讓它在行動和進食過程中保持優(yōu)勢。科學(xué)家們一直在研究如何能將這些精妙的結(jié)構(gòu)和組織化為己用,來改善人們的生活。
四年前,文力老師在哈佛大學(xué)主攻鯊魚仿生方向,當(dāng)他仔細觀察鯊魚照片的時候,偶然注意到鯊魚皮上附著著一種其他的魚類。經(jīng)過標(biāo)本庫查證后,具有很強吸附能力的魚給文力老師留下了深刻的印象。回國后,他便立即著手對魚的研究,文力老師在長期研究中積攢的豐富經(jīng)驗,以及實驗室完整的水動力學(xué)和水下測試設(shè)備,都對該項研究的開展奠定了良好基礎(chǔ)。
“3D打印人造仿生鯊魚皮”

軟體章魚觸手機器人原理樣機
有趣的魚
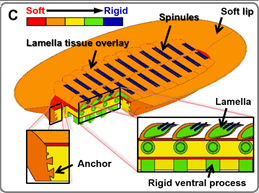
魚主要根據(jù)它的宿主來區(qū)分類別,由于文力老師對鯊魚的熟悉,吸附于鯊魚身上的魚就成了他的首要研究目標(biāo)。魚自身遷徙能力不強,但它和鯊魚一樣喜歡冬暖夏涼,在長期的進化過程中,它頭部的第一背鰭進化成一個分叉且平滑的吸盤,吸盤內(nèi)部有上千根排列整齊的小尖刺,使吸盤具有很強的吸附能力,被吸附的海豚越出水面高速旋轉(zhuǎn)也無法甩掉它。因此魚可以通過吸附宿主來完成遷徙,這個行為被生物學(xué)家形象的稱為“搭順風(fēng)車”。

吸附在宿主身上的魚(圖片來自網(wǎng)絡(luò))
永不停息的探索
關(guān)鍵技術(shù)突破的背后離不開科研人員的不懈努力。在對生物吸盤內(nèi)部鰭片運動學(xué)的觀測中,魚可不會乖乖吸在玻璃壁上任人拍攝,如何能夠完整拍攝到鰭片運動過程是團隊的首個難題。經(jīng)過團隊長時間的思考,決定在一個光學(xué)平臺上搭建觀測平臺,用兩臺高速相機同步觸發(fā)拍攝吸盤內(nèi)部(觀察吸盤組織具體活動)和吸盤側(cè)面(證明吸盤處于吸附狀態(tài)),通過處理后的視頻資料得到有效的鰭片運動數(shù)據(jù)。
仿生模具(除上面的小刺之外)由多材料3D打印一次成形。設(shè)計之初由于僅用軟硬兩種材料來制作模具,導(dǎo)致樣機吸附性不好且易開裂。不斷嘗試改良后,團隊意識到人類的肌肉和骨骼之間是由半月板、韌帶等組織逐漸過渡的,因此使用梯度硬度材料進行3D打印來解決材質(zhì)的模擬問題。吸盤上的小刺尺度小且尖硬,3D打印技術(shù)無法滿足要求的精度和硬度,于是文力老師課題組與美國哈佛大學(xué)的國際團隊合作,利用激光雕刻技術(shù)制造了尺度、形狀都和真實魚高度相似的硬質(zhì)小刺并在測試中效果較好。
梯度變化的3D打印示意圖
此外,一體打印成形的樣機因轉(zhuǎn)動機構(gòu)的存在,吸盤基板上留有空隙,對吸附性能會產(chǎn)生很大影響。于是團隊更換為上下封底的方案,在外側(cè)用橡皮泥密封,另一側(cè)澆灌軟質(zhì)硅膠材料,凝固后再把橡皮泥沖洗掉,并澆灌相同的硅膠材料。這樣既實現(xiàn)了密封,又不影響鰭片傳動機構(gòu)的轉(zhuǎn)動。前后共修改二十余版本才有現(xiàn)在的軟體機器人樣機。

軟體機器人樣機
結(jié)語:
此項目持續(xù)四年之久,期間多名碩士生博士生參與了研究。科研不會止于一篇論文的發(fā)表,這僅僅是一個開端。仿生科技是大自然鬼斧神工和人類科技智慧的共同結(jié)晶,我們相信,憑借文力老師執(zhí)著的海洋情懷,他將會在仿生學(xué)領(lǐng)域取得更多成果。
更多資料:
論文鏈接:
http://robotics.sciencemag.org/content/2/10/eaan8072
Science/AAAS multimedia報道鏈接:
http://www.sciencemag.org/news/2017/09/robotic-remora-can-cling-objects-force-340-times-its-own-weight
MIT Technology Review報道鏈接:
https://www.technologyreview.com/the-download/608916/scientists-have-built-a-shark-sucking-robot-that-is-hideous-and-cool/
Biomechanics and Soft Robotics Lab報道鏈接:
http://softrobotics.buaa.edu.cn/home/index.htm
策劃/文案:曹嘉輝
采訪:譚莉莎、曹嘉輝、李明珠
設(shè)計:任天妹
技術(shù):曹嘉輝
鳴謝:機械工程及自動化學(xué)院、國際交叉科學(xué)研究院仿生軟體機器人實驗室
編審:門戶網(wǎng)站總編總監(jiān)工作室
投稿:geoos@buaa.edu.cn